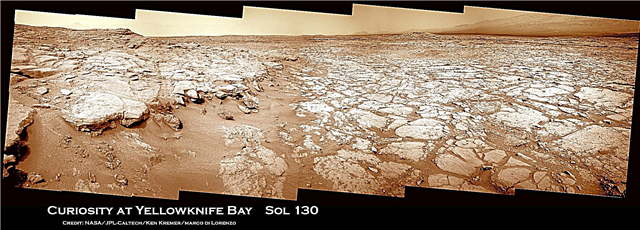
Légende de l'image: Curiosity scanne «Yellowknife Bay» sur le Sol 130. 17 qui a été assemblé à partir d'images de caméra de navigation (Navcam). Crédit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Aujourd'hui (25 décembre), Curiosity célèbre son premier Noël sur Mars à un endroit appelé «Yellowknife Bay». Il s'agit du Sol 138 et près de 5 mois depuis l'atterrissage du pouls le 6 août 2012 à l'intérieur du cratère Gale. Le robot est en excellente santé.
Pendant ce temps, sa sœur aînée Opportunity célébrera bientôt les insondables 9 années terrestres sur Mars dans quelques semaines le 24 janvier 2013 - de l'autre côté de la planète.
Le rover Curiosity de la NASA a atteint la dépression peu profonde nommée «Yellowknife Bay» sur le sol 130 (17 décembre 2012) après être descendu d'environ 2 pieds (0,5 m) sur une pente douce à l'intérieur d'une caractéristique géologique surnommée «Glenelg». Voir nos mosaïques panoramiques de Yellowknife Bay - ci-dessus et ci-dessous pour une vue contextuelle.
L'équipe scientifique est à la recherche d'une roche intéressante pour l'utilisation inaugurale de la perceuse à percussion haute puissance.
Selon un nouveau rapport dans SpaceRef, le forage a été retardé en raison de craintes que le chauffage par friction puisse potentiellement provoquer la liquéfaction de la roche en un «miel martien» gluant qui pourrait potentiellement obstruer et endommager gravement les tamis et mécanismes de manipulation des échantillons. L'équipe réévalue donc soigneusement le type de cible rocheuse et les procédures d'opération de forage avant de s'engager dans l'utilisation initiale du foret à percussion situé sur la tourelle à l'extrémité du bras robotique.
L’équipe a choisi de se rendre à ‘Yellowknife Bay’ car elle présente un type de terrain géologique différent de celui sur lequel Curiosity a conduit précédemment. La zone «Glenelg» se situe à la jonction de trois types de terrains géologiques différents et est la première destination scientifique étendue de Curiosity.
La curiosité est arrivée au bord de la baie de Yellowknife sur le Sol 124 et est entrée dans le bassin sur le Sol 125 (12 décembre) et a pris une vue panoramique de reconnaissance scrutant le lieu invitant. Le rover utilise également le spectromètre minéral à rayons X APXS, le laser ChemCam et l'imageur de lentille à main MAHLI pour recueillir les données de caractérisation scientifique initiales.

La curiosité atteint un sommet autour de la baie de Yellowknife le 125 décembre, le 12 décembre 2012. Le rover a continué de conduire à l'intérieur du bassin à la recherche de la première cible de forage de roche. Crédit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Jusqu'à présent, le rover a parcouru une distance totale de conduite d'environ 700 mètres.
La plupart de l'équipe des sciences et de l'ingénierie obtient une pause bien méritée pour passer du temps avec leurs familles après avoir téléchargé 11 Sols d'activités à l'avance pour garder le robot fredonner pendant les fêtes de Noël. Une équipe squelette du JPL veille pour faire face à toute éventualité.
L'une des principales priorités est l'acquisition d'un panorama couleur Mastcam haute résolution à 360 degrés. Cela sera précieux pour la sélection de la toute première cible de roche à percer et à acquérir un échantillon de l'intérieur - un exploit jamais tenté sur Mars.
«Nous avons décidé de nous rendre dans un endroit avec une bonne vue sur les affleurements entourant la baie de Yellowknife pour permettre une bonne imagerie de ces affleurements avant les vacances», explique Ken Herkenhoff, membre de l'équipe scientifique du rover. "Comme les images sont retournées pendant la pause, nous pouvons les utiliser pour aider à décider où effectuer la première opération de forage."
L'équipe prévoit de choisir une cible de forage au cours du mois de janvier 2013 après un processus de sélection minutieux.
Le bras robotique de 7 pieds (2 m) de long fournira cet échantillon de roche pulvérisé initial aux ports d'entrée sur le pont du rover pour analyse par le duo de haute puissance des laboratoires de chimie miniaturisée nommé Chemin & SAM.

Légende de l'image: Curiosity déploie un bras robotique sur le Sol 129 et examine la roche avec des instruments scientifiques APXS et MAHLI pour caractériser la composition de la roche et du sol. Cette mosaïque composite a été cousue à partir d'images Navcam du Sol 129 (16 décembre) et des sols antérieurs et montre l'emplacement de l'orifice d'entrée d'échantillons Chemin sur le pont du rover. Crédit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
La curiosité passera au moins un mois ou plus à enquêter sur Glenelg avant de partir pour un trek de près d'un an vers sa destination principale - les couches sédimentaires des tronçons inférieurs de la haute montagne de 5 km nommée Mount Sharp.

Légende de l'image: Numérisation du mont Sharp depuis la baie de Yellowknife sur le sol 136. Cette mosaïque de photos assemblée à partir des images de la caméra Mastcam 100 a été prise par Curiosity sur le sol 136 (23 décembre) - depuis son emplacement actuel. Il montre une partie du monticule en couches appelé Mount Sharp, sa destination principale. L'acquisition d'un panorama couleur à haute résolution à 360 degrés dans la baie de Yellowknife est une tâche hautement prioritaire pour le rover pendant les fêtes de Noël. Crédit: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
À vol d'oiseau, les environs à couper le souffle du mont Sharp sont à environ 10 km.
Le but de la mission est de rechercher des habitats et de déterminer si Mars a jamais pu soutenir la vie microbienne dans le passé ou le présent pendant la phase de mission principale de 2 ans.

Légende de l'image: Curiosity Traverse Map, Sol 130. Cette carte montre où Curiosity a conduit entre l'atterrissage sur un site nommé «Bradbury Landing» et la position atteinte pendant le Sol 130 (17 décembre 2012) à un endroit nommé «Yellowknife Bay» qui est à l'intérieur d'une zone appelée "Glenelg". L'encart montre plus en détail les étapes les plus récentes de la traverse. Crédit: NASA / JPL-Caltech / Univ. de l'Arizona